
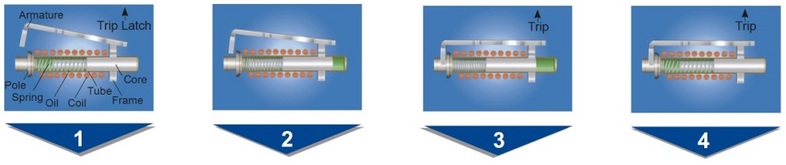
Explanation of the HY-MAG principle in 4 steps:
1. Hydraulic-Magnetic Circuit Breakers (HMCB) operate on the magnetic force produced by a load current flowing through a series connected solenoid coil which is wound around an hermetically sealed tube containing an iron core, a spring and dampening fluid. At currents below the circuit breaker rating, the magnetic flux in the solenoid is insufficient to attract the core towards the pole piece due to the spring pressure. Where an overload occurs, i.e. currents above the circuit breaker rating, the magnetic flux in the solenoid produces sufficient pull on the core to commence its movement toward the pole piece.
2. Where an overload occurs, i.e. currents above the circuit breaker rating, the magnetic flux in the solenoid produces sufficient pull on the core to commence its movement toward the pole piece. During this movement, the hydraulic fluid regulates the cores speed of travel, thereby creating a controlled time delay which is inversely proportional to the magnitude of the current. This time delay is useful in that if the overload is of short duration, i.e. startup of motors, etc., the core returns to its rest position once the overload disappears.
3. If the overload persists, the core reaches the pole piece after a time delay particular to that current and in so doing, the reluctance of the magnetic circuit drops considerably, so that the armature is attracted to the pole face with sufficient force to collapse the latch mechanism (toggle) and consequently trip the breaker. The contacts separate, the current ceases to flow, and the core returns to its rest position.
4. With high values of overloads or short circuit, the magnetic flux produced by the coil is sufficient to attract the armature to the pole face and trip the breaker even though the core has not moved. After tripping, the breaker may be re-closed immediately since there is no cooling down time necessary.
See the Emcomp movie about the CBI products and the HY-MAG technique ...